Test WD-20 WarpAstron Harmonic drive Mount
Test WD-20 WarpAstron Harmonic drive Mount
Door Dick van Tatenhove
Ganymedes heeft mij gevraagd om de WD-20 van WarpAstron te testen onder ASCOM/NINA. Omdat ik de AM5 bezit begin ik even met een korte vergelijking.
Vergelijkingen tussen AM5 en WD-20.
Er is verschil in aandrijving. De AM5 werkt met een tandriem en de WD-20 gebruikt direct Drivetechnologie. Beide mounts zijn even zwaar, met montagering beiden 5.6 kg. De WD-20 heeft een hoger draagvermogen. Dat heeft mede te maken met het krachtmoment t.o.v de poolas. Het verschil tussen beide mounts is 2.8 cm tot de poolas van de montering. Een lange buis op de WD-20 zal daarom iets eerder tegen een driepoot stoten dan de AM5. Het draagvermogen zonder contragewicht van de standaard AM5 is 13 kg (AM5N 15 kg) en voor de WD-20 is dit 22 kg.
De zadelplaten zijn beiden 13 cm. De zadelplaat van de AM5 klemt de dovetail op twee plaatsen over 10 cm aan de knopzijde. Bij de WD-20 klemt deze op de losmandy-maat over de volle breedte van 13 cm.
De maximale slew rate van de WD-20 is momenteel 2.84 graden /sec., dat is wat langzamer dan de AM5. Dit is niet echt een issue maar er is aangekondigd dat met de nieuwe firmware deze wordt verhoogd.
De kop van de WD-20 lijkt kwetsbaar in geval van veel condens of regen. Je kijkt nu via de bovenzijde langs de rand in de montering/eletronica. (zie foto). De reactie van Warp Astron was dat er ruimte is gelaten om de warmte van de motor af te voeren. Bij geen gebruik is het verstandig om de kop af te dekken. De USB-C stekker connectie lijkt nogal kwetsbaar in vergelijk met de USB2 connectie die op de AM5 zit.

Gebruik WD-20:
Het slewen van de WD-20 gaat geruisloos. De mount maakt gebruik van directdrive servomoteren met encoders en heeft daarom geen backlash. (dit zijn dus niet de encoders die de positie bepalen – guiden blijft dus noodzakelijk). Na het slewen is slechts een heel zacht hoog piepgeluidje hoorbaar tijdens het guiden.
Handcontroller:
Er zijn twee versies, bedraad en draadloos (deze laatste is niet getest)
De aansturing van de mount via de handcontroller is wat omslachtig. De lettertjes zijn klein. Het duurt 45 seconden na het activeren van de tracking voordat je kunt slewen.
In de Handcontroller worden slewen en guiding anders benoemd. Met guiding bedoelt men slewen en pulsguiding betekent het normale guiden. De functie Park wordt niet opgeslagen.
De home positie opdracht werkt wel maar staat wat diep in het menu onder goto. Via F2 kom je op de maximale slewsnelheid van 1 (2.84 graden /sec).
De GPS die in de mount zit komt na een tijdje in actie wanneer de mount echt buiten staat.
Uiteindelijk gebruikt de astrofotograaf de Handcontroller uitsluitend om de mount-klem horizontaal te plaatsen en de telescoop te monteren.

Je kunt de mount ook draadloos aansturen met je mobiel via wifi met Skysafari:
Mount type – equatorial go to (German) – Meade LX200- IP192.168.0.1- port number 9998.
Het wachtwoord van de Wifi is 12345678
Belasting van de Montering:
De maximale belasting volgt uit de grafiek. Men adviseert om niet boven de 35 kg te gaan met het totale gewicht dus inclusief contragewichten, daarnaast dient het krachtmoment kleiner te zijn dan 50 nm.

Dit betekent bijvoorbeeld dat je met een 15 cm Apo niet moet willen streven naar een volledig gebalanceerd systeem. Je zou dan met 19,5 kg telescoopbelasting en 17,5 kg aan contragewichten
boven de grens van 35 kg uitkomen. Overigens is het i.v.m. met de traagheid bij rotatie verstandig om contragewichten zo dicht mogelijk tegen de mount te plaatsen. Het is verstandig om de mount aan te zetten voordat er zwaar wordt belast. Hieronder een rekenvoorbeeld o.b.v. mijn 15 cm Apo middels een plaatje als verduidelijking op de tekst in de manual. Bij een minder stabiele driepoot zou 5 of 10 kg CW een optie kunnen zijn.
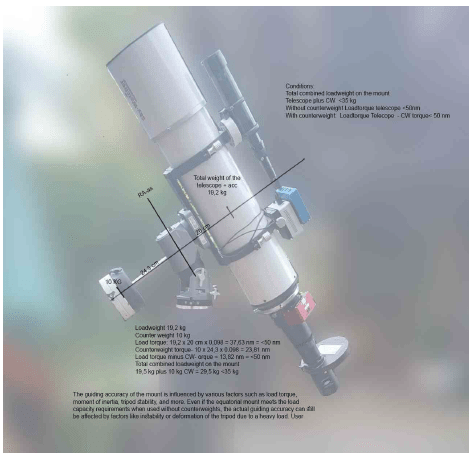

In principe is er voor deze opstelling met 19,2 kg geen contragewicht noodzakelijk mits de driepoot of zuil volledig stijf is. Echter voor het polar alignment is het toch verstandig om bij zware belasting een contragewicht te gebruiken. WarpAstron adviseert om niet meer dan 5 of 10kg CW te gebruiken.
Astrofotografie test WD-20 middels Ascom/Nina
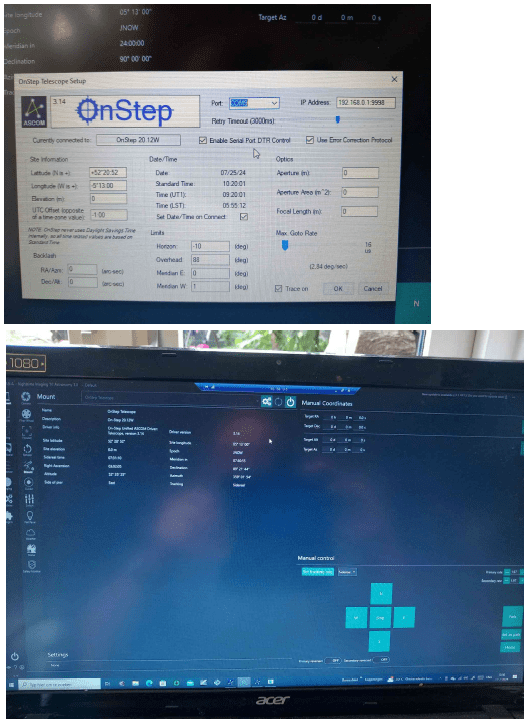
Nina herkent de Onstep mountdrivers zonder problemen. Check altijd even de Park en Home toets rechtsonder in het scherm click op Set tracking en selecteer deze. Dit zal meestal siderial zijn.
Mijn advies is om altijd te gaan slewen vanuit de Home postie. In de Ascom setting kun je eventueel wijzigingen aanbrengen qua limit bij de Meridiaanflip.
Bij de getoonde limitwaarden heb ik geen problemen ondervonden.
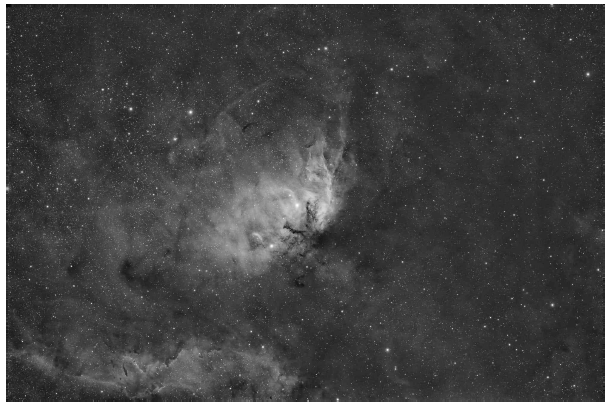
PHD gaf, zoals verwacht, in zijn guidinganalyse aan dat er geen backlash correctie nodig was. Het traject van de Meridiaanflip verliep probleemloos met de aangevinkte “Reverse dec after Meridian flip” instelling in PHD2. Dit geldt tevens voor het parkeren nadat de sequence is beeindigd. Met de Off Axis guider op 1050 mm en Multistar guiding aangevinkt begon ik de test op de Tulpnevel rond de 0,50 RMS eindigde ik in de ochtend met goede seeing met een RMS van 0.37.
Conclusie:
Mijn conclusie is dat er niet veel verschil is tussen RMS guiding resultaten van de AM5 en de WD-20. Er is geen backlash correctie nodig bij de WD-20. Beiden leveren mooie ronde sterretjes op. Het voordeel van de WD-20 is zijn hogere draagvermogen.